FEATURED | Dimensions of Submarine Threat in the Littorals –A Perspective by RADM Dr. S. Kulshrestha (Retd.), INDIAN NAVY
By RADM Dr. S. Kulshrestha (Retd.), INDIAN NAVY
The littorals present a very complex environment in which the platform, weapon and the target interplay is dependent upon the real time and archival understanding of the medium parameters. The article aims to provide a perspective into the extent of the littoral underwater submarine threat and the constraints which hamper its successful prosecution. It also brings out the fact that the Blue water Navy would have to enhance its environmental understanding and modify its approach towards anti submarine operations to reduce likely attritions during littoral conflicts. The article brings out the imperative need to dove tail fundamental environmental research and Indian Naval requirements to tackle the threats in littorals.

“…the very shallow water (VSW) region is a critical point for our offensive forces and can easily, quickly and cheaply be exploited by the enemy. The magnitude of the current deficiency in reconnaissance and neutralization in these regions and the impact on amphibious assault operations were demonstrated during Operation Desert Storm.” — Maj. Gen. Edward J. Hanlon Jr., Director of Expeditionary Warfare, Sea Power, May 1997
A blue water navy’s ability to execute maneuver in littorals is severely compromised due to confined sea spaces, lesser depths, heavy traffic, threats due to lurking quiet diesel submarines, coastal missile batteries, swarms of armed boats, deployed mines and threats from the air. The definition of a littoral region encompasses waters close to the shores as well as greater than 50 nm at sea. The Indian Navy, like all the other blue water navies has not been fundamentally positioned for close combat encounters. It is has generally been expected that sea warfare would have standoff distances of at least 50/60 km if not more between adversaries (outside range of torpedoes and guns). If Carrier groups and anti ship cruise missile (ASCM) cruisers are deployed, the standoff can be up to a couple of hundred kms (ASCM and Air craft limits). However today littorals present an inevitable close quarter engagement situation with CSG remaining well clear of coastal missile batteries and aircraft operating from shore based airfields. In case of countries like China, the CSG may even remain a thousand km away to save itself from a barrage of carrier killer missile like the Don Feng 21 D with a range of over 2000 kms .
Thus littorals have withered away the advantage of the CSG and the big ships as manoeuvring in close quarters is not feasible any more. The lighter ships would have to fight in the littorals with a much larger risk of attrition from the diesel electric submarine, mines, swarm of boats and shore based assets. The blue waters represent large swaths of sea with adequate depths for operations, and much less uncertainties in the sensor — weapon environment. The littorals are confined zones with reducing depths and a very adverse sensor environment. This has drastically compressed reaction times leading to requirements of great agility for the men of war.
A worthy defender is always considered to be in an advantageous position in the littorals, fundamentally due to the intrinsic knowledge and experience in operating in his home environment. It constitutes what the US DOD calls an access denial area likely to impinge upon the US national interests in the Vision 2004 document this has been articulated as “To win on this 21st Century battlefield, the U.S. Navy must be able to dominate the littorals, being out and about, ready to strike on a moment’s notice, anywhere, anytime The Indian Navy has in all probability identified areas in Arabian Sea, Bay of Bengal and Indian Ocean where it may have to engage in littoral conflicts either singly or in concert with coalition of navies, should such a contingency arise. On the other hand 26/11 had opened the coasts to attack by terrorists and the Government of India has initiated efforts to tighten its coastal security. As to the plans of defending own littorals against a formidable expeditionary force, nothing much is known in the open domain, in all likely hood it remains a simplistic defensive model due to insufficient focus and the inevitable funding. The fact remains that ocean rim state navies today are focussing more on littoral capability than building a blue water navy. Indian Navy has to consider the littoral capability seriously whilst modernising and achieve a balance, depending upon its current and future threat perceptions. The blue water force has to have an embedded littoral component force so that the IN can operate in littorals far away from her home ports.
The major under water threats comprise of mines and undetected diesel submarines. However as far as mines are concerned, they are every coastal country’s weapon of choice as they are economic, easy to lay but very hard to detect and sweep. They are the psycho sentinels of defence, since unless their existence is proved it has to be assumed that waters are mine infested and have to be swept before warships can attempt a foray in to the littorals . The clearing of mines for safe passage is a very time consuming and intensive exercise which introduces significant delays in any operation, while taking away element of surprise and granting time to adversary to plan tactics. Therefore in case delays are not acceptable, littoral operations would have to cater for some attrition on account of mines as well as navigation hazards posed due to sunken or damaged ships on the sea route.
The aim of this article is to derive a perspective in to the fundamental dimensions of the littoral medium, platform and weapon with respect to the underwater submarine threat which constitutes the most potent hazard to a powerful navy.
Operating Littoral Environment
The littorals comprise of different types of zones in which a Navy has to operate. These include continental shelf, surf zones, straits and archipelagos, harbors and estuaries. The main thrust of naval operations hinges upon the underwater acoustics (sonic ray plots) which provide not so accurate measure of effectiveness of Sonars. In the continental shelf not much is known about the tactical usage of bioluminescence, plankton or suspended particles and other non acoustic environmental information. Quantifiable effect on performance of different sensors and weapons under various conditions is also not available to the Commander to help him deploy them optimally. Further predictions about conditions for naval operations in continental shelf areas of interest are at best sketchy and no reliable database exists to provide correlation between various environmental conditions that may be encountered. In the surf zone region (within 10 m depth line till the beach), temporal and spatial environmental data is required for effective planning of naval operations however, there are large variations in acoustic data over short and long term. Archipelagos and straits are subject to; swift changes in currents and water masses due to restricted topography, dense shipping, fishing and human traffic which complicate planning. Most of the harbors are estuarine in nature and present a highly intricate and variable environment (tides, currents, wave amplitudes etc) warranting a holistic approach to understand the same.
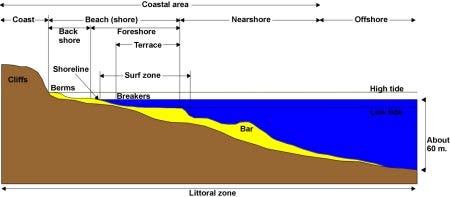
Image Attribute: RADM Dr. S. Kulshrestha (Retd.), INDIAN NAVY
Thus it can be seen that carrying out missions in littorals also involve other aspects of environment in addition to the uncertain under water acoustics which have a direct bearing on the missions. These aspects include real time and archival data bases of; meteorological surface conditions required for efficient operation of IR, Electro optical, and electromagnetic sensor and weapon systems; under water topography, accurate bathymetry, bottom composition, and detailed assessment of oceanographic water column environment for under water sensors and weapons.
The availability of overarching oceanic environmental knowledge would provide insight into enemy submarine operating/hiding areas, location of mines and underwater sea ward defences. Currently the Indian Navy does not have the capability to carry out exhaustive littoral environmental scanning let alone field any sensor or weapon system that can adapt to the dynamic littoral environment and carry out missions with conviction. In fact, even for own littoral zones this type of information is not available which would enable effective deployment of static or dynamic defences.
Effect of Environment on Propagation of Sound in Shallow Waters
A brief description of the acoustic environment in shallow waters is relevant at this stage. The main factor affecting acoustic propagation in deep oceans is the increase in pressure of water column with increasing depth as the temperature remains nearly constant. The speed of sound increases with depth and the sound waves finally hit the bottom and reflect upwards. In shallow waters the rays tend to refract, that is bend upward without going to the bottom. This phenomenon takes place when the refracted sound velocity equals the sound velocity emitted by the source. On reaching the region of the source they again refract towards the depths and this process continues. In very shallow waters the sound rays are reflected upwards from the bottom. The amount of sound energy reflected upwards depends directly on the nature of the sea bottom. Harder the sea bottom better is the reflection and vice versa. In shallow waters it is clear that the sound speed depends mainly on the temperature which in turn depends upon the amount incident solar radiation, wind speeds, wave action etc.
It can therefore be inferred that the acoustic signal in shallow waters is dependent upon factors like temperature, sea surface, nature of sea bottom, waves and tides, in-homogeneities and moving water masses amongst others. These present a very complex effect on the acoustic signal by altering its amplitude, frequency, and correlation properties. Further, multi-path reflections from the bottom, as well as surface put a severe constraint on signal processing. The understanding of the underwater sound propagation remains unsatisfactory to this day. The complex interplay of acoustics, oceanography, marine geophysics, and electronics has bewildered Navies searching for submarines or mines in the shallow waters. Two fundamental issues that of beam forming and lining up the sonar are discussed in the subsequent paragraphs.
Zurk et al in their paper “Robust Adaptive Processing in Littoral Regions with Environmental Uncertainty” have addressed a real time problem in underwater, i.e. the dynamic nature of the sensor, target, medium and the interfering element’s geometry. The moving sensor, target and medium causes difficulties for adaptive beam former sonars which are designed to assume a certain level of stationary conduct over a specified time period . The time period required is dependent upon the number of elements in the array and the coherent integration time. Since large arrays give much better resolution they have a larger number of elements, leading to a moving source transiting more beams during a given observation period. If target is in motion, the target energy is distributed over many beams weakening the signal and degrading the accuracy of targets location. The arrays with larger volumes thus have larger probability of motion losses. Some techniques to reduce these errors include sub-aperture processing, time-varying pre-filtering of the data, and reduced-dimension processing.
Naval sonar systems have become more and more complex over time and require expert operators. Optimizing sonar line ups has become essential in a littoral environment where the acoustic properties change rapidly over time and space domains. With the sonar automatically determining the optimal line up based upon desired inputs from the operator and the sensor feeds of operating environment, the sonar operator would be able to give his full attention to the task of detection, identification and classification of the targets. The necessity of autonomous environmentally adaptive sonar control is imperative in littorals because of the tremendously large number of objects which may be present below the water line and skills of the operator would be put to test to sieve out the elusive submarines.
Warren L.J. Fox et al. “Environmental Adaptive Sonar Control in a Tactical Setting.” Have addressed the issue of sonar line up and have recommended neural networks for generating acoustic model simulations required. Control schemes for Sonars are of two types, namely acoustic model-based and rule-based. Model-based controllers embed an acoustic model in the real-time controller. In acoustic model based controllers, acoustic performance predictions are inputted in to the controller, based upon available estimates of the existing environment, which in turn, gives the feasible sonar line ups. The choice of line up depends upon the chosen parameters for the operation. In the rule based controller, a generic set of operating environmental conditions are defined by the sonar and acoustic experts, which are then subjected to acoustic modeling and the sonar equations to generate the best possible line up. The existing environmental conditions would have to be assessed in real time prior to selection of the best line up available as per design. This approach however may not account for the large number of varying environments that are the hallmark of different littorals, and lead to discrepancies in results. Thus it appears that acoustic model based controller may be a better choice, as it largely takes care of the prevailing conditions at sea, than the rule based one, but it requires much more computational power and time to assess the situation prior to lining up the sonars. Warren L.J. Fox et al have recommended a method of training artificial neural networks for use in a sonar controller for ships as well as unmanned under water vehicles, to emulate the input/output relations of a computationally intensive acoustic model. Artificial neural networks are much faster and utilize far lesser computational capacity.
The Submarine Threat in Littorals
The shallow waters pose a serious problem for under water acoustics, they remain unfriendly to current sensors like towed arrays, variable depth sonars and air dropped sonobuoys due to depth limitations, deployment of torpedoes ( both ship and air launched) and depth charges. Shallow waters with close proximity to land also pose difficulties for radars and magnetic anomaly detectors thus providing a relatively safe operating area for small diesel electric submarines. Detection of surface craft by submarines in passive sonar mode is much easier because of their higher acoustic signatures. The surface ships would perforce resort to active sonar transmission as their passive capabilities are degraded in littorals. This in turn makes them more acoustically visible.
The littoral submarine however has a limited period of quiet operation under water of a couple of days, as it has to either surface or snorkel for recharging its batteries by running its diesel generator sets. The battery capacity drainage is directly proportional to the running speeds, faster the submarine travels quicker is the discharge and hence larger is the discretion rate, which is the charging time required. Interestingly it is this discretion rate, which allows the submarine to be vulnerable to detection. During charging, the radiated noise of diesel generators, the IR signatures and the likely visibility of the snorkel make it susceptible to observation by trained crews. The submarine therefore prefers to lie in wait, barely moving or just sitting at the bottom for the prey to arrive.

Image Attribute: A typical Littoral Warfare Submarine Concept — Andrasta SSK by DCNS
Development of Air independent propulsion technology (AIP) has enhanced the submerged time of submarines by a great extent (from a couple of days to about two weeks). The AIP is dependent upon availability of oxygen on board. The AIP while granting more submerged time to a submarine unfortunately provides the same level of acoustic signature as a snorkelling submarine, thus making it prone to detection.
Fuel cell technology has been successfully interfaced with AIP and Siemens 30–50 KW fuel cell units have been fitted in the German Type 212A submarines since 2009, it is said to be much quieter , provides higher speeds and greater submerged time.
The weapons for the submarines include mines, torpedoes and the submarine launched missiles. The technology ingress in computing, signal processing, hull design and materials have benefitted the submarine, its sensors, weapons and fire control systems. These advances coupled with vagaries of the acoustics in shallow waters have made the diesel submarine a very potent and lethal platform. While many countries have AIP submarines, of interest to India is the acquisition of these submarines by Pakistan since the Indian Navy does not operate an AIP submarine. The Indian Navy today even lacks the adequate numbers of diesel electric submarines required.
The Unmanned Submarine (Unmanned Underwater Vehicle; UUV)
An UUV generally is a machine that uses a propulsion system to transit through the water. It can maneuver in three dimensions (azimuth plane and depth), and control its speed by the use of sophisticated computerized systems on-board the vehicle itself. The term Unmanned underwater vehicle includes, remotely operated vehicles, Paravane, sea gliders and autonomous underwater vehicles.
It can be pre programmed to adhere to course, speed and depths as desired by the operator, at a remote location and carry out specific tasks utilizing a bank of sensors on the UUV. The data collection can be both time and space based and is referenced with respect to coordinates of the place of operation. It can operate under most environmental conditions and because of this, they are used for accurate bathymetric survey and also for sea floor mapping prior to commencing construction of sub-sea structures. The Navies use them for detecting enemy submarines, mines, ISR and area monitoring purposes etc.

Image Attribute: REMUS 600 AUV/UUV by Kongsberg Maritime AS
The UUVs carry out their routine tasks unattended, meaning there by that once deployed the operator is relatively free to attend to other tasks as the UUV reaches its designated area of operation and starts carrying out its mission, be it survey, search, or surveillance.
Compared with many other systems, UUVs are relatively straightforward, with fewer inter-operable systems and component parts, facilitating reverse-engineering of any components that might be restricted in the commercial market place. All of these factors, however also increase the likelihood that even a low tech littoral adversary could easily field offensive, autonomous UUVs, this in turn leads to seeking rapid developments in UUVs by major navies.
UUVs are on the verge of three developments which would accelerate their induction into modern navies. First is the arming of UUVs to create Unmanned Combat Undersea Vehicles (UCUVs). This is virtually accomplished with UUV designs incorporating light weight torpedoes as weapons of choice. Heavier UUVs are contemplating missile launchers and/or heavy weight torpedoes as weapons in their kitty. However these appear to be interim measures, as a new class of weapons specific to unmanned vehicles are already under advanced development. These include much smaller and lighter missiles, torpedoes and guns firing super-cavitating ammunition.
A second potential technology development is radically extended operational ranges for these armed UUVs. Already, the developed countries have invested in programs to create long-range underwater “sea gliders” to conduct long-range Intelligence Preparation of the Operational Environment (IPOE) missions . While the technologies enabling the “sea glider” approach probably do not provide the flexibility and propulsion power to enable armed UUVs, such programs will significantly advance the state of UUV navigation and communications technologies. Leveraging these advancements, other nascent technologies such as Air-independent-propulsion (AIP) or Fuel Cell propulsion or perhaps Aluminium/Vortex Combustors, could provide the propulsion power necessary to effectively deploy armed UUVs even well outside of the operating area limitations of conventionally powered submarines.
Finally, “autonomy” for these armed, long range UUVs will allow them the flexibility to conduct operations far away from the home port. Artificial intelligence (AI) based autonomous control systems are being developed at a frenetic pace, fuelled principally by demand for improved UAVs. Such developments will directly contribute to UUV autonomy, but in fact, are not actually necessary for the majority of “sea denial” missions envisioned for UCUVs. Even with current state of missile seeker technology, UCUVs would only need enough autonomy to navigate to a known area of operations (a port, choke point, or coastal location) and launch, and the missile would do the rest. For more complex missions, weapons could be guided by an on-site observer, for instance on a trawler or even ashore, in real-time or near-real-time. In short, there are a remarkably small number of “hard” technology barriers standing in the way of the long range, autonomous, armed and capable UUVs. There is little reason to think that this capability will be limited to high end, navies only. Thus networked operations of unmanned vehicles with PGMs are going to become the lethal weapon combo for the future.
A request for information has been floated by the Indian Navy to meet its requirement for at least 10 autonomous underwater vehicles (AUVs). These AUVs are to be developed and productionised within four years of contract finalisation. The Navy has opted for a special category MAKE for the armed forces under the Indian Defence Procurement Procedure for high technology complex systems designed, developed and produced indigenously .Modular payload capability of the AUVs have been asked for, where in payloads like underwater cameras for surveillance reconnaissance and high definition sonars can be mounted.
UUVs in various configurations and roles such as communication and navigation nodes, environmental sensors in real time or lie in wait weapon carriers are going to be the choice platform in the littorals. These are expendable if required, economically viable, and offer flexibility in design as being unmanned they can have much lesser degree of safeties.
“The Navy’s defensive MCM capabilities in deep water are considered fair today, but they are still very poor in very shallow water (VSW) — not much better in fact than they were some 50 years ago.”
The naval mine is a relatively cheap, easy to employ, highly effective weapon that affords weaker navies the ability to oppose larger, more technologically advanced adversaries. The mere existence of mines poses enough psychological threat to practically stop maritime operations, and thus deny access to a desired area at sea. Further they can be used as barricades to deter amphibious forces and cause delays in any naval operation in the littoral. Thus, a mine doesn’t have to actually explode to achieve its mission of access denial. North Koreans were able to deter and delay arrival of U.S Marines sufficiently to escape safely, by mining Wonsan Harbour in October of 1950 with about 3000 mines.
Mines are classified based upon their depth of operation, methods of deployment or the way they are actuated. The versatility of deployment can be gauged by the fact that mines can be laid by majority of surface craft, submarines, crafts of opportunity and aircrafts/ helicopters. Mines have been used by countries and non state actors alike with dangerous effects and thus continue to pose a credible threat to Navies as well as merchant marine.
Types of mines are based upon the depth at which they are deployed. As per the 21ST Century U.S. Navy Mine Warfare document the underwater battle space has been divided into five depth zones of, Deep Water (deeper than 300 feet), Shallow Water (40–300 feet), Very Shallow Water (10–40 feet), the Surf Zone (from the beach to 10 feet) and the Craft Landing Zone (the actual beach). Mines are of three basic types namely, floating or drifting mines, moored or buoyant mines and bottom or ground mines.
Drifting mines float on surface and are difficult to detect and identify because of factors like visibility, sea state and marine growth etc. Moored mines are tethered mines using anchoring cables to adjust their depths. These can be contact or influenced based mines. Bottom mines are most difficult to locate as they can also get buried under sediment layer which cannot be penetrated by normal sonars.
Mines can be actuated by contact, influence, and by remote or a combination thereof. With modular Target Detection Device (TDD) upgrade kits, the older contact mines can be easily upgraded to actuate by influence methods. The influence needed for actuation could be pressure, acoustic or magnetic or a desired combination. In addition ship counters and anti mine counter systems are also being incorporated in to the mines to make them much more potent and lethal.
Mine technology has kept a step ahead of the ships designs for low acoustic and magnetic signatures, and many countries are engaged in development and production of naval mines. Non metallic casings, anechoic coatings, modern electronics and finally reasonable costs have made mines a choice weapon for poor and rich nations alike. It is estimated that about 20 countries export mines while about 30 produce them. Sweden Russia, China and Italy are the leading exporters. Mine MN 103 Manta from SEI SpA of Italy is one of the most exported mines in the world with about 5,000 Mantas in inventories throughout the world.
It is estimated that China has in its inventory about a hundred thousand mines of various vintages and from the WWI simple moored contact mines to modern rocket-propelled mines with advanced electronic systems for detection and signal processing.
The submarine torpedoes are an embodiment of a synergetic mix of engineering disciplines ranging from mechanics, hydraulics, electronics, acoustics, explosive chemistry etc. to sophisticated software and computing. Their development has therefore involved differences in propulsion designs from steam engines to electrical motors to thermal engines and rocket motors. The control and guidance systems have also evolved from simplistic mechanical/ hydraulic to sophisticated electronic and onboard computer based systems. The guidance has further diversified in to self guided and wire guided varieties. The simple straight runners have given way to active passive homers and wake homers to attack moving targets. The warheads have moved from minol based to TNT/RDX/Al and now on to insensitive explosives with a life of over 40 years. The warheads over the years have been fitted with simple contact exploders, to acoustic influence and magnetic influence proximity fuses. The diameter of the torpedoes has ranged from 324mm to 483mm to 650mm, and before settling for internationally acceptable 533mm. Interestingly with the advent of microelectronics space has never been a constraint for the torpedo and electronic/ software updates always get comfortably accommodated in the torpedo.

Image Attribute: Loading of Mk 48 Adcap Torpedo in HMAS Rankin / Source: Wikimedia Commons
A major technical feature that sets apart a torpedo from a missile is the fact that a practice torpedo is recoverable for reuse; this enables excellent weapon capability assessment, crew training as well as analysis of vital firing geometry. Some of the noteworthy heavy weight torpedoes are the American Mk 48 Adcap, the Italian Blackshark, the German DM2A4 and the Russian 53–65 K oxygen torpedo.
The torpedo has been evolving with leaps in technology but some characteristics towards which the heavy weight torpedoes are headed include; faster speeds (~over 60 Kts), Quieter signature, better reliability in detection, enhanced ranges of operation (>100 Kms),smarter electronics, and increased lethality.
The cruise missile owes it origins to the German V1/V2 rockets and mainly to the fact that manned aircraft missions had proved to be very expensive during the wars (loss of trained fighter pilots as well as expensive aircraft). Unfortunately the cruise missile development until the 1970s resulted only in unreliable and inaccurate outcomes which were not acceptable to the armed forces. Cruise missiles overcame their inherent technical difficulties and owe their tremendous success and popularity to some of the technological advances in the fields of; firstly, propulsion, namely small turbofan jet engines which resulted in smaller and lighter airframes; secondly miniaturization of electronic components, which led to much smaller on board computers thus to much better guidance and control abilities and finally, high density fuels and much better explosives and smaller warheads.
Cruise missiles have become weapons of choice at sea because of their ability to fly close to the sea surface at very high speeds (sub-sonic/supersonic), formidable wave point programming and lethal explosive capabilities. These make the missiles very difficult to detect and counter at sea. Some of the naval cruise missiles worth mentioning are the Brahmos, the Tomahawk, the Club and the Exocet family.
It appears that the trend towards hypersonic scramjet cruise missiles will continue to gather momentum and such missiles could be in the naval inventories by 2020. Coupled with hypersonic missiles would be real time target data updating and guidance by extremely fast computers and satellite based systems. The kinetic energy of hypersonic cruise missiles would be a lethality multiplier against targets at sea and therefore such a missile would be a formidable weapon without a credible countermeasure as on date. The costs continue to increase with new developments; however maintenance requirements appear to be reducing with canistered missiles.
As Far as weapons are concerned the Indian Navy has a fairly reliable capability in mines, torpedoes and cruise missiles, however the numbers appear deficient for the defensive role in own littorals.
The submarines today can launch such missiles from their torpedo tubes or from vertical launchers which can also be retrofitted. In fact the submarines can launch torpedoes, missiles, UUVs and also lay mines comfortably. Thus making them, the toughest of platforms to counter.
Conclusion
“The marriage of air independent, nonnuclear submarines with over-the-horizon, fire and forget antiship cruise missiles and high endurance, wake homing torpedoes . . . [means that] traditional ASW approaches, employing radar flooding and speed, are not likely to be successful against this threat.” — Rear Admiral Malcolm Fages
The dimensions of submarine threat in the littorals, discussed briefly above encompass the underwater acoustic environment, the developments in submarine technology, the underwater unmanned vehicle, and the weapons. The discussion has brought out the potent danger an undetected submarine in littorals presents to the aggressor.
The Navy today faces a deficiency in an all inclusive understanding of the undersea environment in the coastal areas due to which it is difficult to counter the diesel electric submarine threat in the littorals. This deficit would not allow correct positioning and deployment of sensors for timely detection of the underwater peril. Research and development is also needed in the quality of sensors such that they are embedded with real time environmental information and can calibrate themselves accordingly for best results. As far as other environmental sensors are concerned, like those dependent on zoo plankton behaviour or bioluminescence fundamental research needs to be initiated with naval needs in focus. The acquisition of submarines and UUVs should be fast tracked if Indian Navy wants to be a credible littoral force.
About The Author:
The author RADM Dr. S. Kulshrestha (Retd.), INDIAN NAVY, holds expertise in quality assurance of naval armament and ammunition. He is an alumnus of the NDC and a PhD from JNU. He superannuated from the post of Dir General Naval Armament Inspection in 2011. He is unaffiliated and writes in defence journals on issues related to Armament technology and indigenisation.
Note:
1. The speed of sound is given by the equation (available in text books):-C(T,P,S)=1449.2+4.6 T+0.055 T2+1.39 (S−35)+0.016 D(1) / Where: C is in m/sec, T in ° Celsius, D in metres and embodies density and static pressure effects. S in parts per thousand.
The speed of sound is dependent upon temperature and depth because the S, the salinity is nearly constant at 35 ppt for sea water.
References:
[i] G D Bakshi China — Dong Feng 21-D: A Game Changer?
http://www.globaldefence.net/portals/aviation/21579-china-dong-feng-21-d-a-game-changer.html?showall=1 ( Accessed 20 Oct 12)
[ii] VISION | PRESENCE | POWER 2004, A Program Guide to the U.S. Navy, Chapter 1 http://www.navy.mil/navydata/policy/vision/vis04/vpp04-ch1.pdf ( Accessed 17 Oct 12)
[iii] US Navy DOD document, Concept for future naval Countermeasures inlittoral power projection 1998. http://www.fas.org/man/dod-101/sys/ship/weaps/docs/mcm.htm ( Accessed 23 Oct 12)
[iv]Robert J. Urick, Principles of Underwater Sound 3rd Edition Peninsula Pub (August 1, 1996)
[v] Lisa M. Zurk, Nigel Lee and Brian Tracey, “Robust Adaptive Processing in Littoral Regions with Environmental Uncertainty” in Impact of Littoral Environmental Variability of Acoustic Predictions and Sonar Performance, ed. Nicholas Pace and Finn Jensen [Bruxelles, Netherlands: Kluwer Academic Publishing, 2002], 515. http://web.cecs.pdx.edu/~zurkl/publications/saclant_2002.pdf ( Accessed 30 Oct 12)
[vi] Warren L.J. Fox et al. “Environmental Adaptive Sonar Control in a Tactical Setting.” in Impact of Littoral Environmental Variability of Acoustic Predictions and Sonar Performance, ed. Nicholas Pace and Finn Jensen [Bruxelles, Netherlands: Kluwer Academic Publishing, 2002], 595
[1] Benedict, Richard R. “The Unravelling and Revitalization of U.S. Navy Antisubmarine Warfare.” Naval War College Review 58, no.2, (Spring 2005), http://www.jhuapl.edu/ourwork/nsa/papers/art4-sp05.pdf ( Accessed 27 Oct 12)
[viii] Rajat Pandit, Pak adding submarine muscle as India dithers, The Times of India Apr 11, 2011.
[ix] K. L. Mahoney and N. D. Allen Glider Observations of Optical Backscatter in Different Jerlov Water Types: Implications to US Naval Operations, Research paper, 2009. Naval Oceanographic Office, Stennis Space Center, MS 39522 USA
[x] Milan Vego. “Future MCM Systems: Organic of Dedicated, Manned or Unmanned,” Naval Forces 26, no.4,(2005).
[xi] 21ST Century U.S. Navy Mine Warfare, http://www.navy.mil/n85/miw_primer-june2009.pdf
[xii] Scott C. Truver. TAKING MINES SERIOUSLY Mine Warfare in China’s Near Seas, Naval War College Review, Spring 2012, Vol. 65, No. 2
[xiii] Malcolm I. Fages, Rear Adm., USN; remarks at Naval Submarine League Symposium, June 2000, as published in Submarine Review (October 2000), p. 34.
_________________________________________
Originally published at www.indrastra.com on December 20, 2015.
